11.02.2020 by Milena Riedl
Přenos reálných provozních podmínek z praxe do laboratoře pomocí DMA Gabo Eplexor®
Flexibilita systému DMA Gabo Eplexor® díky nezávislým pohonům umožňuje realizovat velké množství různých testovacích podmínek z praktických aplikací v laboratorním prostředí. Dr. Sahbi Aloui vysvětluje, jak lze pomocí DMA Gabo Eplexor® přesně simulovat zátěžovou situaci příslušné aplikace.
Dr. Sahbi Aloui, aplikační laboratoř
Co jsou technické elastomery?
Technické elastomery mají vynikající elastické vlastnosti. Lze je opakovaně deformovat a po mechanickém odlehčení se vracejí téměř do původní délky. V závislosti na typu mohou technické elastomery účinně uchovávat nebo rozptylovat, tj. transformovat, mechanickou energii. Proto se používají v mnoha aplikacích regulace vibrací, např. v pneumatikách, tlumičích vibrací v motorových a kolejových vozidlech, dopravníkových pásech, těsněních, hadicích atd.
Viskoelastické chování
Technické elastomery lze zatěžovat staticky nebo dynamicky, případně oběma způsoby současně. V případě statického zatížení je zatížení v čase konstantní a často úměrné vlastní hmotnosti. Dynamické zatížení je však funkcí času a je buď vnější (pasivní), nebo definované pohonem (aktivní). Dynamické zatížení je způsobeno například vnějšími vlivy, jako jsou zemětřesení, mořské vlny nebo silný vítr. Vyskytují se také v řadě technických systémů large v důsledku periodicky se pohybujících hmot. Viskoelastické vlastnosti elastomerových kompozitů při různých teplotách a frekvencích se určují pomocí dynamicko-mechanické analýzy (DMA). Systémy DMA jsou určeny pro kontrolu kvality, materiálu i uvolňování výrobků a vývoj materiálů. Při staticko-dynamickém zatížení se nejprve nastaví statické zatížení a poté se pro každé statické zatížení mění dynamické zatížení. Tím je vzorek vystaven sinusově se měnícímu mechanickému zatížení s konstantní frekvencí a konstantní amplitudou.
DMA Gabo Eplexor® - 2 nezávislé pohony
Hlavním rysem systémů DMA Gabo Eplexor® je nezávislé generování/nastavení statického a dynamického zatížení. Statické předběžné zatížení je generováno servomotorem a do vzorku se zavádí prostřednictvím snímače síly a držáku vzorku. Dynamické zatížení je generováno elektrodynamickým oscilátorem a rovněž přenášeno na vzorek. Použití dvou nezávislých pohonů sice vyžaduje větší technické úsilí, ale zároveň přináší výrazně vyšší flexibilitu při použití.
Statické a dynamické zatížení
Na rozdíl od experimentů ve smyku je při zkouškách v tahu, tlaku a ohybu naprosto nezbytné, aby statické předběžné zatížení bylo vyšší než dynamické zatížení. Toto omezení vyplývá ze skutečnosti, že vzorek v tahu se může při střídavém tahovém zatížení vybočit, pokud amplituda dynamického zatížení převýší složku statického zatížení. Střídavé tlakové zatížení vede k dočasné ztrátě kontaktu mezi vzorkem a držákem vzorku. Správné zkoušení bez artefaktů není v tomto případě možné.
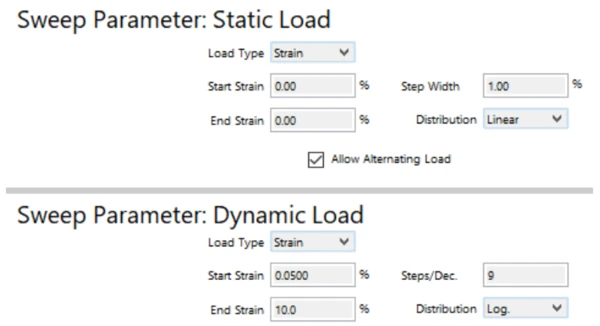
"Povolení střídavého zatížení"
U některých aplikací, jako jsou pryžové dopravníkové pásy, hnací řemeny nebo pryžokovová ložiska, může v praxi dojít k odchylkám od výše uvedeného pravidla, že statické předběžné zatížení musí být vyšší než skutečné dynamické zatížení, pokud je vzpěru nebo zvedání zabráněno jinými technickými opatřeními. Pomocí parametru "Povolit střídavé zatížení" se v případě potřeby odstraní omezení, že dynamická amplituda by měla být menší než statické zatížení. V tomto režimu je tedy možné také přesně simulovat zatěžovací situaci příslušné aplikace (viz obrázek 1). Pro takové zatěžovací podmínky se obecně doporučují vzorky, které jsou krátké a tlusté, protože nemají tendenci se "vyboulovat" jako dlouhé a tenké vzorky.
Payneův účinek vulkanizátů SBR plněných sazemi
Obrázek 2 ukazuje příklad dynamického měření zatížení v tahu pro vzorek SBR plněný sazemi. Měření bylo provedeno při pokojové teplotě a frekvenci 10 Hz. Při první zkoušce byla amplituda dynamické deformace postupně zvyšována z 0,05 % na 10 % (modrá křivka); při druhé zkoušce byl tento postup proveden opačně a amplituda dynamické deformace byla postupně snižována z 10 % zpět na původní amplitudu 0,05 % (červená křivka). Statické předpětí zde nebylo použito. Modul pružnostiKomplexní modul pružnosti (pružná složka), modul skladování nebo G' je "reálná" část vzorků celkového komplexního modulu pružnosti. Tato pružná složka udává pevnou nebo fázovou odezvu měřeného vzorku. Modul pružnosti |E*| klesá s rostoucí amplitudou deformace (obr. 2, modrá křivka). Závislost modulu skladovatelnosti na amplitudě deformace u plněných elastomerů je také známá jako Paynův efekt.
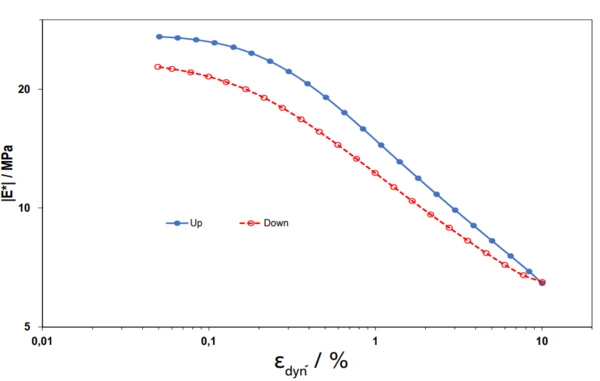
Mullinsův efekt
S klesající amplitudou deformace (obr. 2, červená křivka) se |E*| zvyšuje, ale nedosahuje sklonu "panenské" křivky (modrá křivka). Tento efekt měknutí v tahu je znám jako Mullinsův efektMullinsův efekt popisuje jev typický pro pryžové materiály.Mullinsův efekt. Za toto chování jsou zodpovědné vratné a nevratné změny v polymerní matrici, struktuře zesíťování a síti plniva během zatížení. Mezi některé příčiny patří desorpce adsorbovaných úseků řetězce z povrchu plniva, přerušení zesíťovacích bodů a/nebo kolaps aglomerace plniva pod vlivem mechanického namáhání.
Souhrn
Flexibilita systému DMA Gabo Eplexor® díky jeho nezávislým pohonům umožňuje realizovat velké množství různých zkušebních podmínek z praktických aplikací v laboratorním prostředí, jak ukazuje výše uvedený příklad dynamické deformační variace. Více informací o našem DMA Gabo Eplexor® naleznete zde!