11.02.2020 by Milena Riedl
Trasferimento delle condizioni operative reali dalla pratica al laboratorio con l'ausilio di un sistema di controllo della temperatura DMA Gabo Eplexor®
La flessibilità di DMA Gabo Eplexor®, grazie ai suoi azionamenti indipendenti, consente di realizzare una grande varietà di condizioni di prova di applicazioni pratiche in laboratorio. Il Dr. Sahbi Aloui spiega come è possibile utilizzare DMA Gabo Eplexor® per simulare esattamente la situazione di carico di una determinata applicazione.
del Dr. Sahbi Aloui, Laboratorio Applicazioni
Cosa sono gli elastomeri tecnici?
Gli elastomeri tecnici hanno un eccellente comportamento elastico. Possono essere deformati ripetutamente e ritornare quasi alla loro lunghezza originale dopo il RilassamentoQuando si applica una deformazione costante a una mescola di gomma, la forza necessaria per mantenere tale deformazione non è costante, ma diminuisce nel tempo; questo comportamento è noto come rilassamento delle sollecitazioni. Il processo responsabile del rilassamento delle tensioni può essere fisico o chimico e, in condizioni normali, si verificano entrambi contemporaneamente. rilassamento meccanico. A seconda del tipo, gli elastomeri tecnici possono immagazzinare o dissipare efficacemente, cioè trasformare, l'energia meccanica. Per questo motivo sono utilizzati in molte applicazioni di controllo delle VibrazioniUn processo meccanico di oscillazione è chiamato vibrazione. La vibrazione è un fenomeno meccanico in cui si verificano oscillazioni intorno a un punto di equilibrio. In molti casi, le vibrazioni sono indesiderate, perché sprecano energia e creano suoni indesiderati. Ad esempio, i movimenti vibratori dei motori, dei motori elettrici o di qualsiasi dispositivo meccanico in funzione sono tipicamente indesiderati. Tali vibrazioni possono essere causate da squilibri nelle parti rotanti, da attriti non uniformi o dall'ingranamento dei denti degli ingranaggi. In genere, una progettazione accurata riduce al minimo le vibrazioni indesiderate.vibrazioni, come ad esempio nei pneumatici, negli assorbitori di VibrazioniUn processo meccanico di oscillazione è chiamato vibrazione. La vibrazione è un fenomeno meccanico in cui si verificano oscillazioni intorno a un punto di equilibrio. In molti casi, le vibrazioni sono indesiderate, perché sprecano energia e creano suoni indesiderati. Ad esempio, i movimenti vibratori dei motori, dei motori elettrici o di qualsiasi dispositivo meccanico in funzione sono tipicamente indesiderati. Tali vibrazioni possono essere causate da squilibri nelle parti rotanti, da attriti non uniformi o dall'ingranamento dei denti degli ingranaggi. In genere, una progettazione accurata riduce al minimo le vibrazioni indesiderate.vibrazioni dei veicoli a motore e ferroviari, nei nastri trasportatori, nelle guarnizioni, nei tubi flessibili, ecc.
Comportamento visco-elastico
Gli elastomeri tecnici possono essere sottoposti a carichi statici, dinamici o a entrambi i tipi di carico. Nel caso di un carico statico, il carico è costante nel tempo e spesso commisurato al proprio peso. Il carico dinamico, invece, è una funzione del tempo ed è imposto dall'esterno (passivo) o definito da un azionamento (attivo). I carichi dinamici sono causati, ad esempio, da influenze esterne come terremoti, onde marine o forti venti. Si verificano anche in un numero large di sistemi tecnici come risultato di masse in movimento periodico. Le proprietà visco-elastiche dei compositi elastomerici a diverse temperature e frequenze sono determinate mediante analisi dinamico-meccaniche (DMA). I sistemi DMA sono progettati per il controllo qualità, il rilascio dei materiali e lo sviluppo dei materiali. Per i carichi statico-dinamici, vengono prima impostati i carichi statici e poi viene variato il carico dinamico per ogni carico statico. In questo modo, il campione è sottoposto a un carico meccanico a variazione sinusoidale di frequenza costante e ampiezza costante.
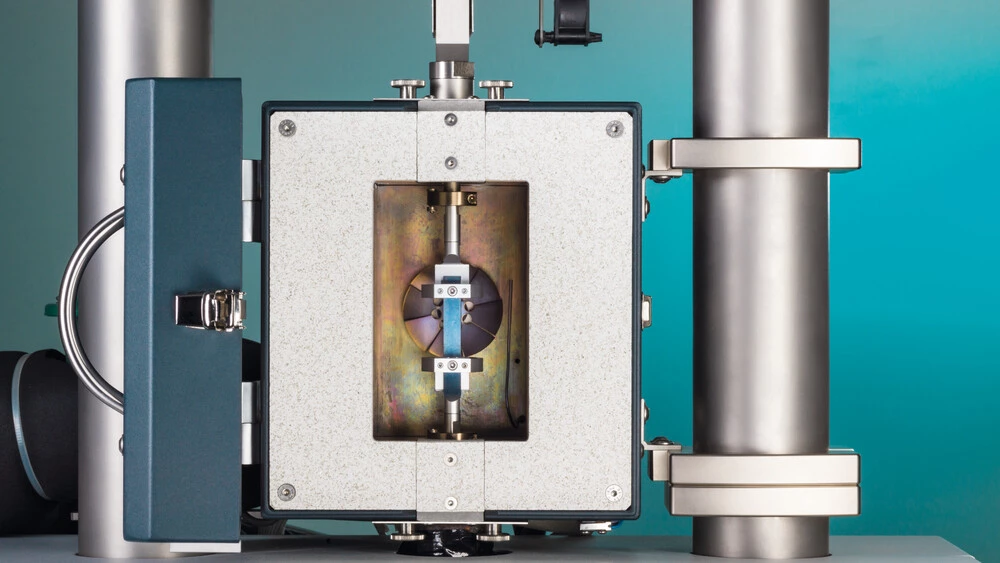
DMA GABO Eplexor® - 2 unità indipendenti
La caratteristica principale dei sistemi DMA GABO Eplexor® è la generazione/impostazione indipendente di carichi statici e dinamici. Il precarico statico è generato da un servomotore e introdotto nel campione attraverso il trasduttore di forza e il supporto del campione. Il carico dinamico è generato da un oscillatore elettrodinamico e anch'esso trasferito al campione. Sebbene l'utilizzo di due azionamenti indipendenti richieda un maggiore impegno tecnico, si ottiene anche una maggiore flessibilità d'uso.
Carico statico e dinamico
A differenza degli esperimenti di taglio, nelle prove di trazione, compressione e flessione è assolutamente obbligatorio che il precarico statico sia superiore al carico dinamico. Questa restrizione è dovuta al fatto che un campione in trazione può deformarsi sotto carichi di trazione alternati se l'ampiezza del carico dinamico supera la componente del carico statico. I carichi di pressione alternati provocano una temporanea perdita di contatto tra il campione e il portacampioni. In questo caso non è possibile eseguire prove corrette e prive di artefatti.
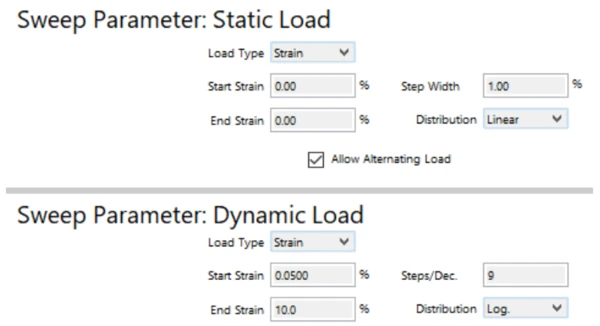
"Consentire il carico alternato"
Per alcune applicazioni, come i nastri trasportatori in gomma, le cinghie di trasmissione o i cuscinetti in gomma-metallo, nella pratica possono verificarsi deviazioni dalla regola di cui sopra, secondo cui il precarico statico deve essere superiore al carico dinamico effettivo, se la deformazione o il sollevamento sono impediti da altre misure tecniche. Con il parametro "Consenti carico alternato" si elimina, se necessario, la restrizione secondo cui l'ampiezza dinamica deve essere smallsuperiore al carico statico. In questa modalità, è quindi possibile simulare esattamente la situazione di carico della rispettiva applicazione (vedere figura 1). Per tali condizioni di carico, si consigliano generalmente campioni corti e spessi, che non tendono a "rigonfiarsi" come fanno i campioni lunghi e sottili.
Effetto payne dei vulcanizzati SBR caricati con nerofumo
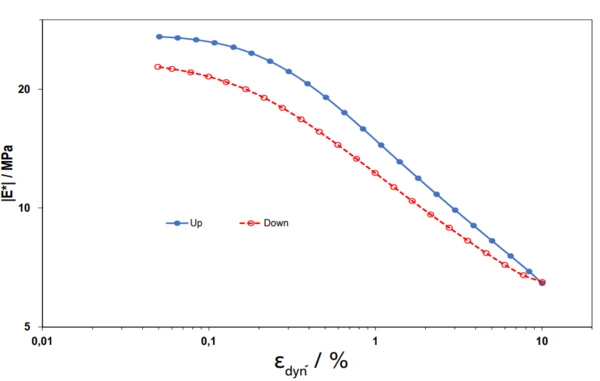
La Figura 2 mostra un esempio di sweep di carico dinamico sotto sforzo di trazione per un campione di SBR riempito di nerofumo. La misura è stata effettuata a temperatura ambiente e a una frequenza di 10 Hz. Nella prima prova, l'ampiezza della deformazione dinamica è stata aumentata in modo graduale dallo 0,05% al 10% (curva blu); per la seconda prova, si è proceduto in modo inverso e l'ampiezza dinamica è stata ridotta gradualmente dal 10% all'ampiezza iniziale dello 0,05% (curva rossa). In questo caso non è stata applicata una pre-sollecitazione statica. Il modulo di elasticità |E*| diminuisce con l'aumentare dell'ampiezza di deformazione (figura 2, curva blu). La dipendenza del Elasticità e modulo di elasticitàL'elasticità della gomma o elasticità dell'entropia descrive la resistenza di qualsiasi sistema di gomma o elastomero contro una deformazione o uno sforzo applicato dall'esterno. modulo di accumulo dall'ampiezza di deformazione per gli elastomeri caricati è nota anche come Effetto PayneL'effetto Payne è la diminuzione della resistenza di un sistema di elastomeri riempiti e reticolati all'aumentare dell'ampiezza della deformazione.effetto Payne.
L'effetto Mullins
Con un'ampiezza di deformazione decrescente (figura 2, curva rossa), |E*| aumenta, ma non raggiunge la pendenza della curva "vergine" (curva blu). Questo effetto di ammorbidimento della tensione è noto come Effetto MullinsL'effetto Mullins descrive un fenomeno tipico dei materiali in gomma.effetto Mullins. I cambiamenti reversibili e irreversibili nella matrice polimerica, nella struttura di reticolazione e nella rete di riempimento durante il carico sono responsabili di questo comportamento. Alcune cause includono il desorbimento di sezioni di catena adsorbite dalla superficie del riempimento, la rottura dei punti di reticolazione e/o il collasso dell'agglomerato di riempimento sotto l'influenza delle sollecitazioni meccaniche.
Sintesi
La flessibilità del DMA GABO Eplexor®, grazie ai suoi azionamenti indipendenti, consente di realizzare una grande varietà di condizioni di prova da applicazioni pratiche in laboratorio, come dimostra l'esempio precedente di variazione della deformazione dinamica. Per saperne di più sul nostro DMA GABO Eplexor® cliccate qui!