11.02.2020 by Milena Riedl
Transferring Real Operating Conditions from Practice into the Laboratory Using the DMA GABO Eplexor®
The flexibility of the DMA GABO Eplexor® through its independent drives allows for the realization of a great variety of test conditions from practical applications in a laboratory setting. Dr. Sahbi Aloui explains how you can use the DMA GABO Eplexor® to exactly simulate the load situation of a respective application.
by Dr. Sahbi Aloui, Applications Laboratory
What are Technical Elastomers?
Technical elastomers feature excellent elastic behavior. They can be repeatedly deformed and return to nearly their original length after mechanical relief. Depending on the type, technical elastomers can effectively store or dissipate, i.e., transform, mechanical energy. That is why they are used in many VibrationA mechanic process of oscillation is called vibration. Vibration is a mechanical phenomenon whereby oscillations occur about an equilibrium point. In many cases, vibration is undesirable, wasting energy and creating unwanted sound. For example, the vibrational motions of engines, electric motors, or any mechanical device in operation are typically unwanted. Such vibrations could be caused by imbalances in the rotating parts, uneven friction, or the meshing of gear teeth. Careful designs usually minimize unwanted vibrations.vibration control applications, such as in tires, VibrationA mechanic process of oscillation is called vibration. Vibration is a mechanical phenomenon whereby oscillations occur about an equilibrium point. In many cases, vibration is undesirable, wasting energy and creating unwanted sound. For example, the vibrational motions of engines, electric motors, or any mechanical device in operation are typically unwanted. Such vibrations could be caused by imbalances in the rotating parts, uneven friction, or the meshing of gear teeth. Careful designs usually minimize unwanted vibrations.vibration absorbers in motor and rail vehicles, conveyer belts, seals, hoses, etc.
Visco-Elastic Behavior
Technical elastomers can be loaded either statically or dynamically or both at the same time. In the case of a static load, the load is constant over time and often commensurate with its own weight. The dynamic load, however, is a function of time and is either externally imposed (passive) or defined by a drive (active). Dynamic loads are caused, for example, by external influences such as earthquakes, sea waves or strong winds. They also occur in a large number of technical systems as a result of periodically moving masses. The visco-elastic properties of the elastomer composites at different temperatures and frequencies are determined by means of dynamicmechanical analysis (DMA). DMA systems are designed for quality control, material as well as product release and material development. For static-dynamic loads, the static loads are first set and then the dynamic load is varied for each static load. Thereby, the sample is subjected to a sinusoidally changing mechanical load of constant frequency and constant amplitude.
DMA GABO Eplexor® – 2 Independent Drives
The main feature of the DMA GABO Eplexor® systems is the independent generation/setting of static and dynamic loads. The static pre-load is generated by a servo motor and introduced into the sample via the force transducer and the sample holder. The dynamic load is generated by an electrodynamic oscillator and also transferred to the sample. Although using two independent drives requires greater technical effort, it also results in significantly higher flexibility in use.
Static and Dynamic Load
In contrast with shear experiments, it is absolutely mandatory in tension, compression and bending load tests for the static pre-load to be higher than the dynamic load. This restriction is due to the fact that a tensile sample can buckle under alternating tensile loads if the dynamic load amplitude exceeds the static load component. Alternating pressure loads result in a temporary loss of contact between the sample and the sample holder. Correct testing free of artefacts is not possible in this case.
“Allowing Alternating Load”
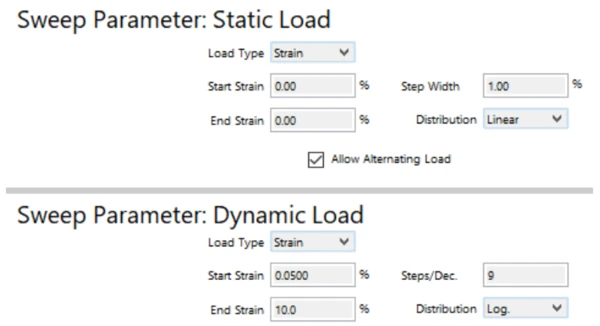
For some applications such as rubber conveyor belts, drive belts or rubber-metal bearings, deviations from the above rule – that the static pre-load must be higher than the actual dynamic load – may occur in practice if buckling or lifting is prevented by other technical measures. By means of the “Allow Alternating Load“ parameter, the restriction that a dynamic amplitude should be smaller than the static load is removed, if required. In this mode, it is therefore also possible to exactly simulate the load situation of the respective application (see figure 1). For such load conditions, samples that are short and thick are generally recommended as they do not tend to “bulge” as long, thin specimens do.
Payne Effect of Carbon Black Filled SBR Vulcanisates
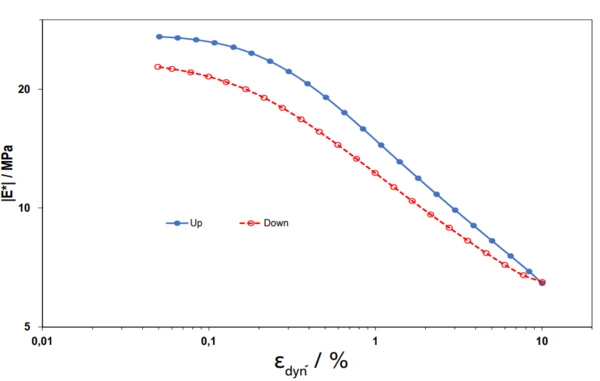
Figure 2 shows the example of a dynamic load sweep under tensile StressStress is defined as a level of force applied on a sample with a well-defined cross section. (Stress = force/area). Samples having a circular or rectangular cross section can be compressed or stretched. Elastic materials like rubber can be stretched up to 5 to 10 times their original length.stress for a carbon black-filled SBR sample. The measurement was carried out at room temperature and a frequency of 10 Hz. In the first test, the dynamic deformation amplitude was increased stepwise from 0.05% to 10% (blue curve); for the second test, this was carried out in reverse and the dynamic amplitude was reduced stepwise from 10% back to the initial amplitude of 0.05% (red curve). A static pre-StrainStrain describes a deformation of a material, which is loaded mechanically by an external force or stress. Rubber compounds show creep properties, if a static load is applied.strain was not applied here. The modulus of elasticity |E*| decreases with increasing deformation amplitude (figure 2, blue curve). The dependence of the storage modulus on the deformation amplitude for filled elastomers is also known as the Payne effect.
The Mullins Effect
With a decreasing deformation amplitude (figure 2, red curve), |E*| increases, but does not reach the slope of the “virgin” curve (blue curve). This effect of tension softening is known as the Mullins effect. Reversible and irreversible changes in the polymer matrix, the crosslinking structure and the filler network during load are responsible for this behavior. Some causes include desorption of adsorbed chain sections from the filler surface, breaking of the crosslinking points and/or collapse of the filler agglomeration under the influence of mechanical StressStress is defined as a level of force applied on a sample with a well-defined cross section. (Stress = force/area). Samples having a circular or rectangular cross section can be compressed or stretched. Elastic materials like rubber can be stretched up to 5 to 10 times their original length.stress.
Summary
The flexibility of the DMA GABO Eplexor® through its independent drives allows for the realization of a great variety of test conditions from practical applications in a laboratory setting, as shown by the above example of dynamic deformation variation. Learn more about our DMA GABO Eplexor® here!