Introduction
Le mot "rhéologie" est composé des deux termes grecs "rheos" (écoulement) et "-logy" (science). Il désigne l'étude du comportement d'écoulement et de déformation des matériaux dans certaines conditions (température, taux de cisaillement, etc.). Pour la plupart des matériaux, ces propriétés dépendent fortement de la vitesse du processus. Par exemple, en général, les polymères s'amincissent par cisaillement, c'est-à-dire que leur viscosité de cisaillement, ou résistance à l'écoulement, diminue avec l'augmentation de la vitesse de cisaillement. En revanche, certains matériaux présentent un comportement d'épaississement par cisaillement. Un exemple tiré de la cuisine ( classic ) est une suspension d'eau et d'amidon. Un mouvement lent permet de la mélanger ; un battement plus rapide entraîne une forte augmentation de la viscosité de cisaillement et la dispersion devient dure.
En raison de cette forte dépendance du taux de cisaillement sur les propriétés rhéologiques, la caractérisation doit être effectuée dans des conditions orientées vers le processus pour être décisive. Deux méthodes de mesure sont disponibles. Alors que le rhéomètre capillaire Rosand reproduit les conditions des processus rapides tels que le moulage par injection, le rhéomètre rotatif Kinexus convient aux applications avec un taux de cisaillement plus lent, telles que l'écoulement du ketchup de la bouteille et sa constitution structurelle sur la plaque.
Le rhéomètre rotatif Kinexus dispose également, pour ces mesures, d'un capteur de force normale sensible à haute résolution de force, qui permet de mesurer la force dans le sens vertical. Ce capteur, associé à une résolution de déplacement élevée et à un débit de données important, permet de quantifier la perception sensorielle en plus des études rhéologiques classiques. Par exemple, le Kinexus peut être utilisé pour simuler les mouvements de la langue contre le palais lorsque le chocolat fond dans la bouche (voir ici pour plus d'informations).
Dans ce qui suit, la régulation de la force normale du Kinexus sera utilisée pour quantifier le comportement haptique d'un clavier en film plastique.
Tâche et objectif
Dans le cadre d'un projet de développement d'un nouveau produit, il est prévu d'utiliser un nouveau clavier en film plastique. Son interrupteur à bouton-poussoir doit avoir le même retour tactile que les interrupteurs du clavier à feuille plastique de série des produits précédents. Pour ce faire, la force de déclenchement du clavier à feuille plastique de série est déterminée à l'aide du rhéomètre rotatif Kinexus, et cette force est spécifiée comme métrique pour le nouveau clavier à feuille plastique.
Échantillons et méthodes de mesure
Les mesures ont été effectuées sur les quatre interrupteurs du clavier à feuille de plastique illustré à la figure 1. Les interrupteurs sont nommés dans le tableau 1 en fonction de leurs symboles.

Tableau 1 : Désignation des quatre interrupteurs
| Désignation | Symbole |
|---|---|
| Interrupteur 1 | Flèche |
| Interrupteur 2 | Soleil |
| Interrupteur 3 | Lignes |
| Interrupteur 4 | En veille |
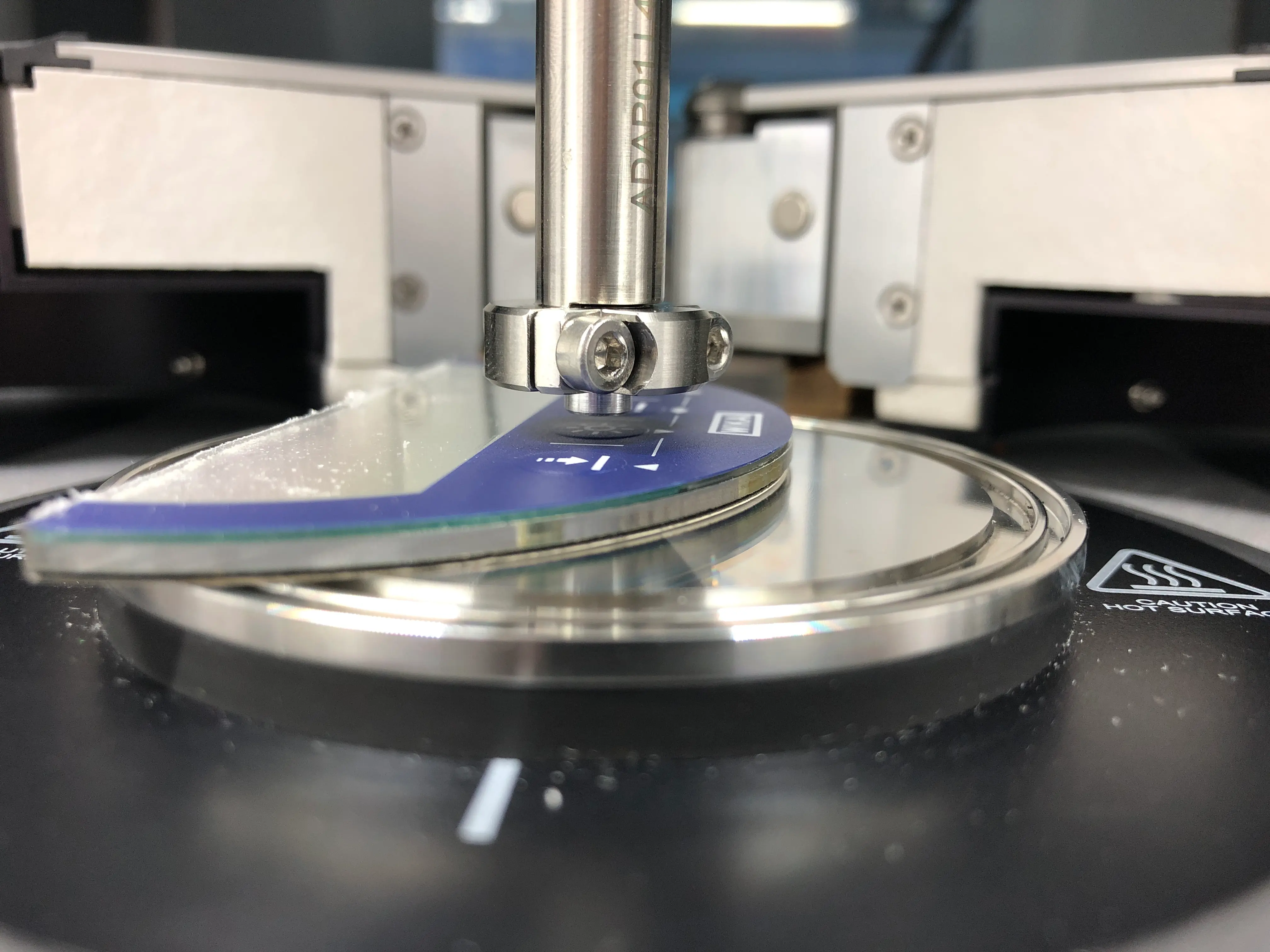
Le clavier en film plastique a été scié en deux parties pour le test, afin d'éviter qu'il ne bascule pendant l'enquête. En outre, le fil flexible a été enlevé. Le clavier préparé a été placé sur la plaque de mesure inférieure du rhéomètre rotatif Kinexus (voir figure 2).

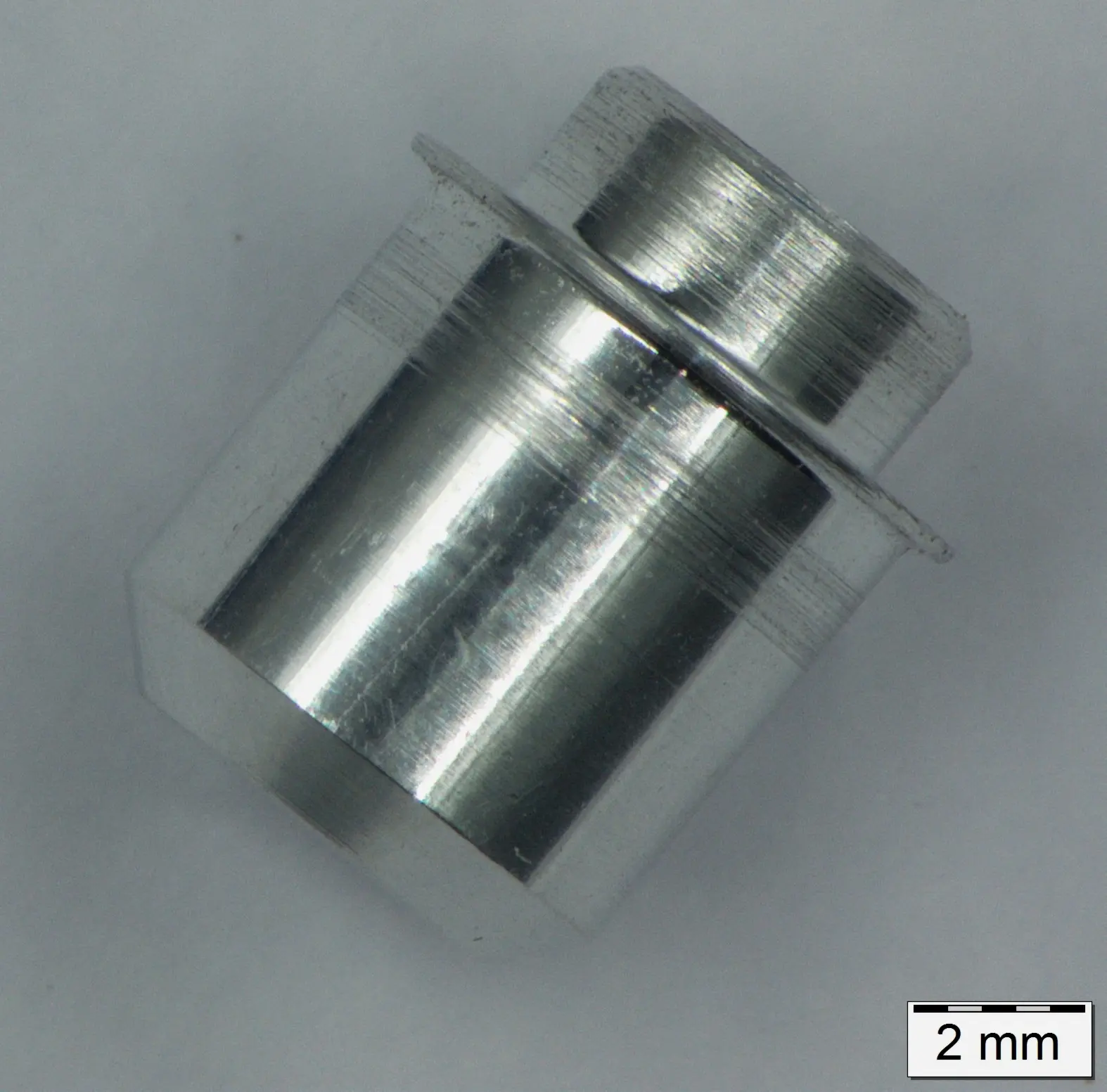
Dans le service de prototypage sur site pour la fabrication mécanique, une plaque à usage unique de 8 mm en aluminium a été tournée de 5,4 mm (voir figure 3). Cette opération visait à s'assurer que seul le commutateur était mesuré.
La géométrie de mesure supérieure a été conduite jusqu'au clavier. Ensuite, le clavier a été orienté de manière à ce que la géométrie de mesure soit placée au-dessus d'un interrupteur à bouton-poussoir (voir figure 4).
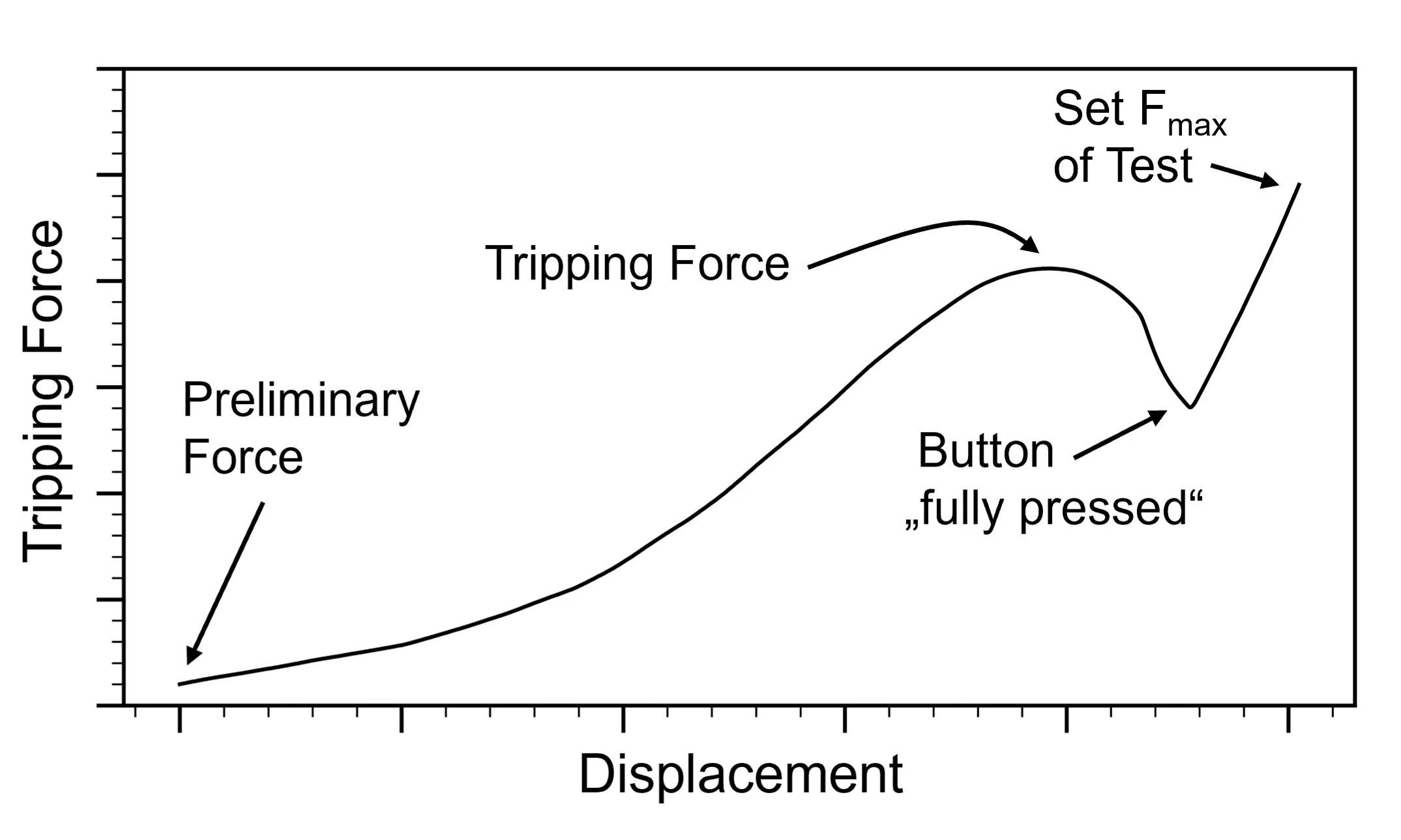
Trois mesures ont été effectuées par interrupteur. Pour ce faire, une force préliminaire (compression) a été appliquée. À ce stade, la valeur du déplacement est fixée à zéro. Ensuite, une valeur de force maximale est définie, à laquelle le logiciel de mesure et d'évaluation, rSpace, met fin à l'essai. Après avoir atteint la force préliminaire, le système de mesure se déplace à une vitesse de 0,01 mm/s vers le clavier de la feuille de plastique jusqu'à ce que la force maximale soit atteinte.
La figure 5 illustre, à titre d'exemple, le diagramme charge-déplacement qui en résulte. La force de déclenchement apparaît comme un maximum local. Après avoir dépassé la force de déclenchement, une force moindre est nécessaire pour appuyer sur le bouton, jusqu'à ce qu'il soit poussé au travers de la frappe ; la force augmente ensuite de façon linéaire jusqu'à ce que la valeur d'arrêt de la force soit atteinte.
Résultats des mesures
La figure 6 montre le diagramme charge-déplacement pour les trois interrupteurs à bouton-poussoir. L'axe des y représente la force et l'axe des x le déplacement. Les trois courbes affichées dans d'autres couleurs pour chaque diagramme représentent les trois essais par interrupteur.
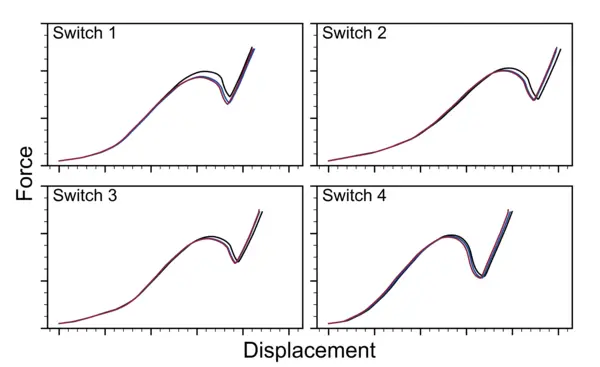
La figure 7 montre les résultats de l'essai en laboratoire. La force de déclenchement est indiquée sur l'axe des y. L'axe des x montre les interrupteurs à bouton-poussoir respectifs. La figure 6 présente l'évaluation des maxima locaux.
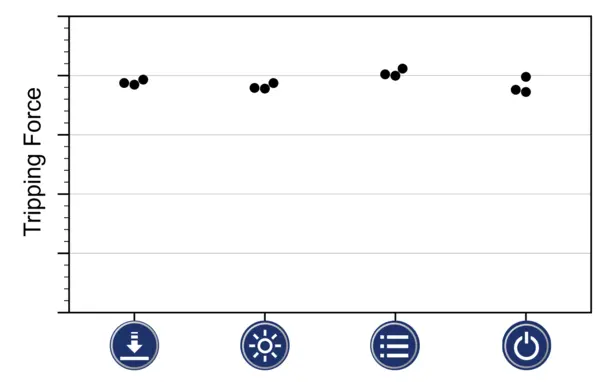
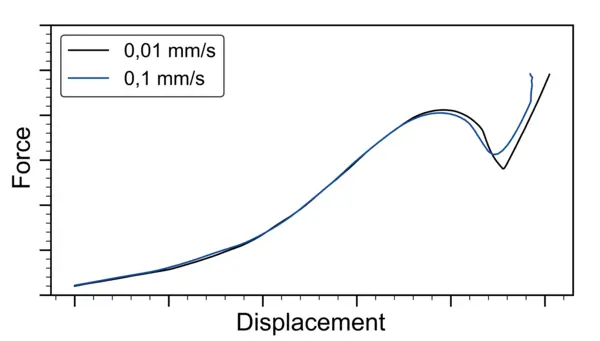
Un autre essai avec une vitesse d'essai plus élevée a été réalisé afin de s'assurer qu'il n'existe pas d'écart large dû à la vitesse d'essai (voir figure 8). Ici, cependant, il n'y a pas eu de différences dans la force de déclenchement. Les différences dans la progression de la force se situent dans la plage de reproductibilité (voir également la figure 6).
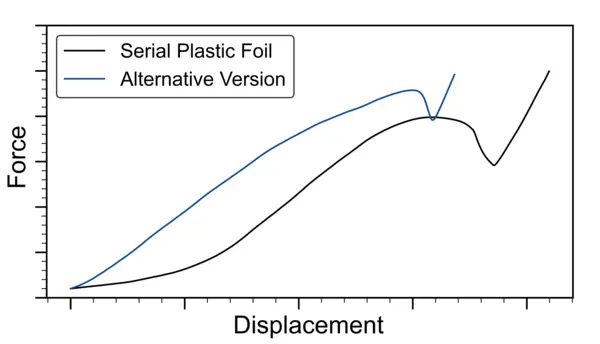
En outre, d'autres claviers ont été testés. Des écarts peuvent être constatés au niveau de la progression de la force et des forces de déclenchement, comme le montre la figure 9 avec un autre exemple.
Résumé
Grâce à sa régulation sensible de la force normale et à son débit de données élevé, le rhéomètre rotatif Kinexus a été utilisé pour déterminer le comportement haptique de quatre boutons-poussoirs d'un clavier en plastique. Les résultats montrent que la force de déclenchement peut être mesurée de manière reproductible. Cela permet de déterminer une norme pour le retour tactile et de la comparer à d'autres solutions.
Précision, innovation, confiance - Technique de mesure de WIKA
Depuis plus de 75 ans, WIKA est synonyme de précision et d'innovation dans les techniques de mesure. En tant que partenaire mondial de premier plan, WIKA propose des solutions pour la mesure de la pression, de la température, de la force, du niveau et du débit, ainsi que pour l'étalonnage et la gestion du gaz SF6.
Avec environ 11 200 employés dans le monde, WIKA développe des solutions spécifiques aux applications en collaboration avec des universités et des entreprises industrielles. Ses produits et systèmes allient fiabilité et technologie de pointe - pour le progrès de ses clients et partenaires.
Outre le rhéomètre rotatif Kinexus, WIKA collabore avec l'Institut de recherche sur le cancer et l'Institut de recherche sur les maladies infectieuses DMA 303 Eplexor®® et le TMA 402 F3 Hyperion®®. Ces deux méthodes sont utilisées pour déterminer les températures de fonctionnement des polymères et des matériaux, et pour compléter les fiches techniques de simulation.