Wprowadzenie
Naprężenie σ wynikające ze stałego odkształcenia ε0 przyłożonego do polimeru jest zależne od czasu[1]. wynika to z faktu, że łańcuchy polimerowe ulegają przegrupowaniu w celu rozluźnienia naprężeń spowodowanych odkształceniem [2]. w konsekwencji moduł relaksacji jest zależny od czasu [2]:
Co więcej, zakładając, że wzrost temperatury nie zmienia ruchów molekularnych, a jedynie je przyspiesza [3], moduł relaksacji zależy nie tylko od czasu, ale także od temperatury:
Czas i temperatura są ze sobą ściśle powiązane. Wzrost temperatury zwiększa wolną objętość między makrocząsteczkami. W ten sposób będą one bardziej zdolne do ślizgania się po sobie, skracając czas relaksacji materiału i inne właściwości, np. jego lepkość, odporność na pękanie, moduł ścinania itp.
Pomiar oscylacji
Górna płyta oscyluje z określoną częstotliwością f [Hz] (lub ω [rad/s]) i amplitudą [%] (lub odkształceniem ścinającym γ [%]). Określane jest naprężenie ścinające σ [Pa] wymagane dla tej oscylacji. Wynik: Określono właściwości lepkosprężyste próbki, w szczególności jej moduły sprężystości i stratnego ścinania.
W rzeczywistości zachowanie większości materiałów lepkosprężystych w jednej temperaturze można przewidzieć na podstawie zachowania w innej temperaturze poprzez zmianę skali czasowej [4]. Dwa różne modele opisują współczynnik przesunięcia aT, tj. stosunek czasów relaksacji w temperaturach T i Tr [2]:
- Przesunięcie Arrheniusa, ważne dla polimerów półkrystalicznych i amorficznych tworzyw termoplastycznych w temperaturach wyższych niż Tg + 100 K:
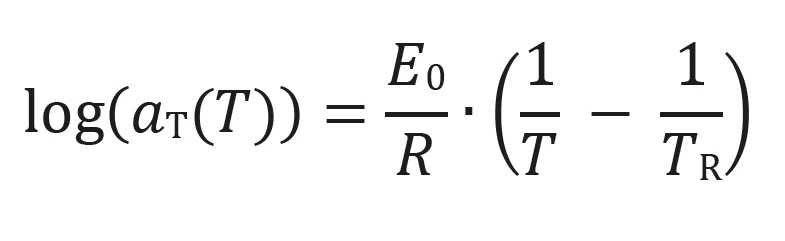
E0: energia aktywacji relaksacji [J/mol]; R: stała gazowa;TR: temperatura odniesienia [K]
- Przesunięcie WLF, ważne dla temperatur wokół przejścia szklistego:
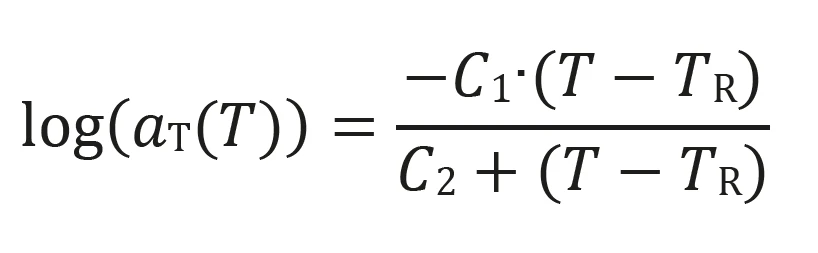
C1,C2: Parametry zależne od materiału;TR: Temperatura odniesienia [K]
Możliwość przesunięcia krzywych właściwości lepkosprężystych jest bardzo wygodna, ponieważ znacznie skraca czas pomiaru. Poniżej przedstawiono zasadę superpozycji czas-temperatura w celu utworzenia krzywej wzorcowej dla lepiszcza asfaltowego. W tym celu przeprowadzane są pomiary przemiatania częstotliwości w różnych temperaturach.
Tabela 1: Warunki pomiarów oscylacji
| urządzenie | Kinexus DSR |
| Tryb pomiaru | Oscylacja, przemiatanie częstotliwości |
| Geometria | Płyta-płytka, średnica: 4 mm (PP4) |
| Szczelina | 1.7 mm |
| Temperatura | -30°C, -15°C, 0°C, 15°C i 30°C |
| Odkształcenie | 0.017%, 0.079%, 0.020%, 0.398%, 0.796% |
| Częstotliwość | 100 do 0,1 rad.s-1 |
Warunki pomiaru i wyniki
Tabela 1 przedstawia warunki pomiaru. Rysunki od 1 do 5 przedstawiają krzywe wynikowe pomiarów przemiatania częstotliwości w pięciu różnych temperaturach. Rysunki 6, 7 i 8 porównują sprężysty moduł ścinania, lepki moduł ścinania i kąt fazowy wszystkich pomiarów.
Im wyższa temperatura, tym niższy sprężysty moduł ścinania. Zgodnie z oczekiwaniami, lepiszcze asfaltowe staje się sztywniejsze wraz ze spadkiem temperatury. W temperaturze 30°C stratny moduł ścinania jest wyższy niż sprężysty moduł ścinania. W tej temperaturze właściwości "ciekłe" materiału dominują nad jego właściwościami "stałymi". W tym przypadku kąt fazowy jest nieco większy niż 45° w całym zakresie częstotliwości (rysunek 1). Materiał jest lepkosprężystą cieczą.
Pomiar w temperaturze 15°C pokazuje skrzyżowanie sprężystego i lepkiego modułu ścinania przy częstotliwości 2,5 rad.s-1 (rysunek 2). W tym punkcie faza wynosi dokładnie 45°. Dla niższych częstotliwości niż częstotliwość przecięcia, dominują właściwości podobne do cieczy.
Testy w temperaturach 0°C, -15°C i -30°C wykazały zmniejszenie kąta fazowego wraz ze spadkiem temperatury. Jednak wzrost kąta fazowego w kierunku niższych częstotliwości pokazuje, że dla wszystkich temperatur próbka najprawdopodobniej jest cieczą lepkosprężystą. Im niższa temperatura, tym później kąt fazowy osiąga wartość 45°.
Zachowanie asfaltu w temperaturze 0°C, a nawet w niższych temperaturach, jest ważne, aby przewidzieć jego stabilność w zimnych krajach. W tym celu kluczowa jest częstotliwość krzyżowania. Jednak ze względów praktycznych nie można jej wykryć eksperymentalnie, ponieważ pomiar zająłby zbyt dużo czasu. Na szczęście zastosowanie wyjaśnionej superpozycji czasowo-temperaturowej umożliwia utworzenie krzywej wzorcowej, tj. obliczenie pożądanych krzywych w jednej określonej temperaturze dla szerszego zakresu częstotliwości.
Rysunek 9 przedstawia konstrukcję krzywej wzorcowej modułu sprężystości przy ścinaniu w temperaturze 0°C. Krzywe zmierzone w niższej temperaturze (-30°C, -15°C) i wyższej temperaturze (15°C, 30°C) niż ta temperatura odniesienia są przesunięte odpowiednio w prawo i w lewo o współczynnik przesunięcia aT. Innymi słowy, proces relaksacji zachodzi szybciej (przesunięcie do wyższych częstotliwości), gdy temperatura wzrasta. Obliczenie krzywej wzorcowej i współczynników stosowanych w modelach Arrheniusa i WLF odbywa się automatycznie w oprogramowaniu rSpace (patrz Tabela 2).
Należy zwrócić uwagę na częstotliwość początkową krzywej wzorcowej: 1.6-10-5 rad/s, oznacza to czas ponad 170 godzin (ponad siedem dni!) tylko na pomiar tego jednego punktu! Taki test byłby niepraktyczny do przeprowadzenia.
Kąt fazowy
Kąt fazowy δ (tan δ= G"/G´) jest względną miarą lepkich i elastycznych właściwości materiału. Waha się od 0° dla materiału w pełni elastycznego do 90° dla materiału w pełni lepkiego.
Tabela 2: Współczynniki Arrheniusa i WLF obliczone na podstawie pomiarów dla temperatury odniesienia 0°C. Współczynniki WLF k1 i k2 odpowiadają C1 i C2 równania WLF; współczynnik Arrheniusa k1 współczynnikowi E0/R modelu Arrheniusa.

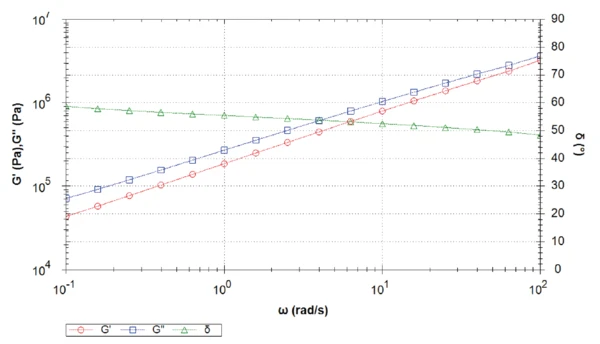
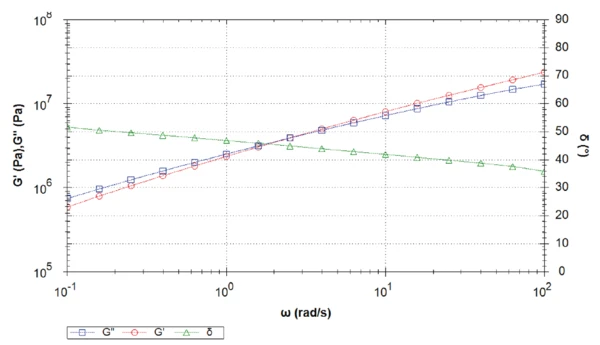
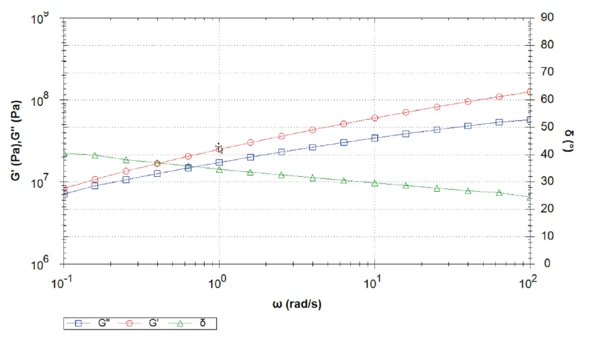
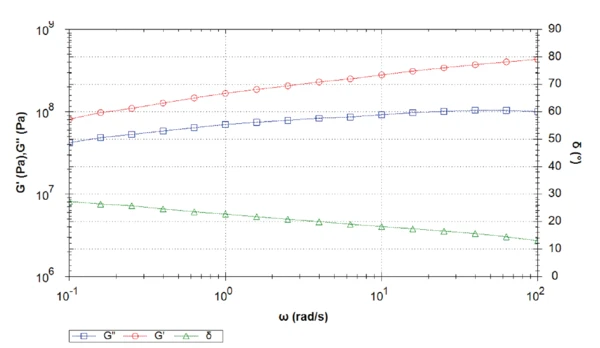
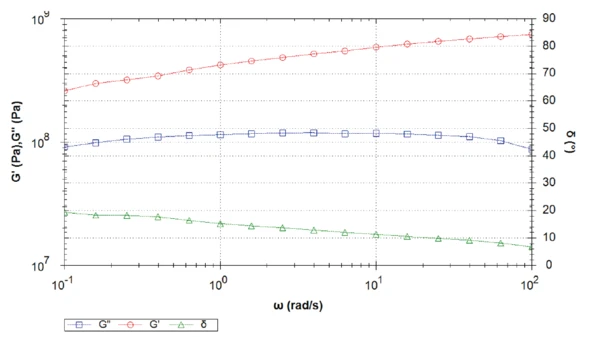
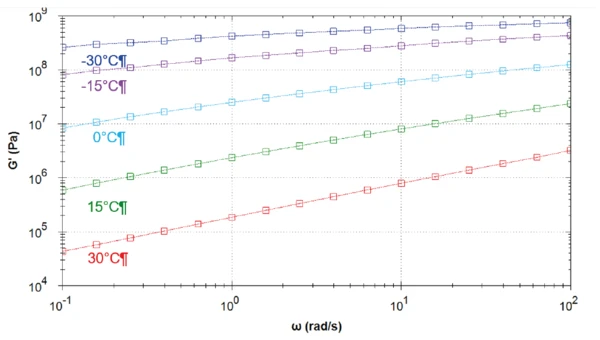
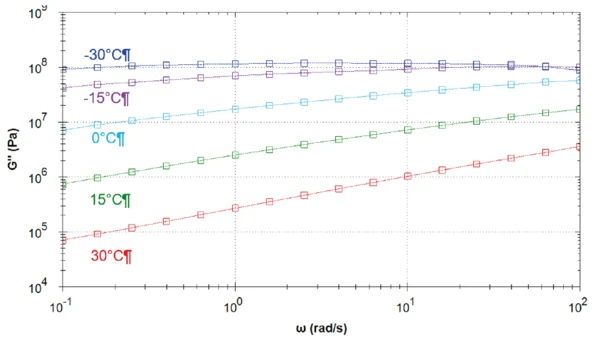
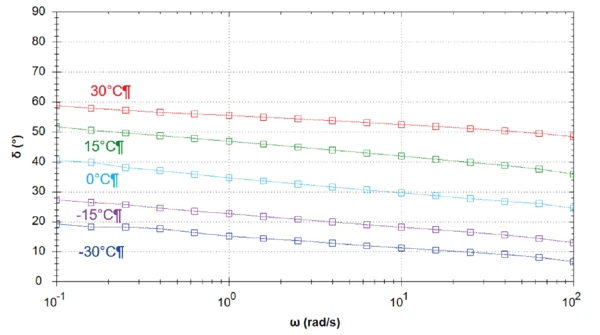
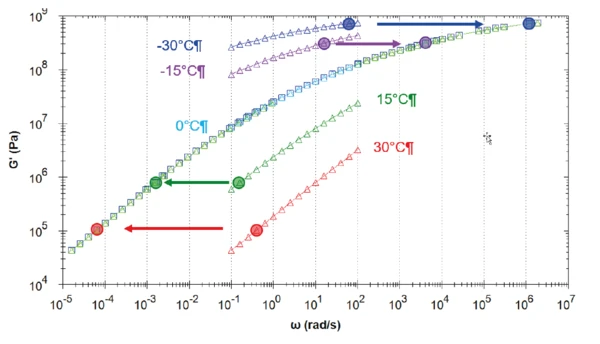
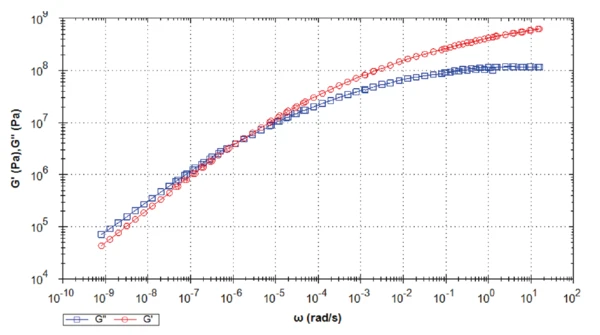
Tabela 3: Wyznaczanie krzywych głównych sprężystych i lepkich modułów ścinania w różnych temperaturach

Rysunek 10 przedstawia krzywą wzorcową lepiszcza asfaltowego dla temperatury -30°C. Im niższa temperatura, tym niższy zakres częstotliwości osiągnięty w obliczeniach. Tutaj pierwszy punkt znajduje się poniżej 10-9 rad-s-1! Skrzyżowanie wykryte między 10-7 a 10-6 rad-s-1 zostałoby wykryte tylko poprzez wykonanie bardzo czasochłonnego pomiaru.
Tabela 3 podsumowuje wyniki krzyżowania się sprężystych i lepkich modułów ścinania wykrytych dla wszystkich temperatur. Asfalt zawsze zachowuje się jak lepkosprężysta ciecz w określonych temperaturach. Im niższa temperatura, tym niższa częstotliwość krzyżowania i tym dłuższy proces destabilizacji struktury materiału.
Jeśli skrzyżowanie krzywych G' i G'' występuje przy 2,4∙10-3 Hz w temperaturze 0°C, odpowiada to skali czasowej około 7 minut. Oznacza to, że materiał zachowuje się głównie elastycznie, jeśli skala czasowa jest krótsza niż 7 minut. W praktyce oznacza to, że droga jest stabilna pod obciążeniem w liniowym zakresie lepkosprężystości. Jeśli skala czasowa jest dłuższa, wzrasta tendencja do deformacji materiału (powstawania kolein).
W przypadku stosowania tego lepiszcza asfaltowego w chłodniejszym klimacie, np. w temperaturze -30 °C, Punkt przecięciaW teście reologicznym, takim jak przemiatanie częstotliwości lub przemiatanie czas/temperatura, punkt przecięcia jest wygodnym punktem odniesienia wskazującym punkt "przejścia" próbki. przejście między wartościami G' i G'' występuje z mniejszą częstotliwością, np. skala czasowa wydłuża się (w tym przypadku ok. 2 miesięcy).
Wnioski
Zachowanie lepkosprężyste lepiszcza asfaltowego określono w temperaturach od -30°C do 30°C. Im niższa temperatura badania, tym niższa częstotliwość krzyżowania. Zbieranie punktów danych w zakresie niskich częstotliwości w celu uzyskania zwrotnicy wiąże się z bardzo długim czasem pomiaru (kilka tygodni), a zatem nie jest wygodne w praktyce. Zasada superpozycji czasowo-temperaturowej umożliwiła przezwyciężenie tego problemu. Zamiast przeprowadzać długotrwałe testy, przeprowadzono pomiary oscylacji w pięciu różnych temperaturach w zwykłym zakresie częstotliwości. Uzyskane wykresy zostały wykorzystane do wygenerowania krzywych wzorcowych.