소개
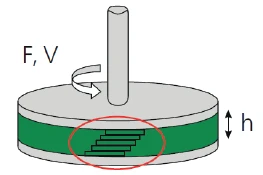
점도 측정은 재료의 전단 점도를 결정합니다. 이 유형의 테스트에서는 두 개의 플레이트 사이에 샘플을 놓습니다. 상부 플레이트는 정의된 전단 속도(또는 전단 응력)로 회전합니다(그림 1 참조). 전단 속도는 상부 플레이트의 각속도 V와 두 플레이트 사이의 거리 h를 사용하여 결정됩니다. 이 전단 속도를 유도하는 데 필요한 전단 응력은 적용된 토크 F를 사용하여 계산됩니다.
이러한 측정은 위에서 설명한 대로 전단 속도 제어 또는 전단 응력 제어로 수행할 수 있습니다.
이 경우 전단 응력이 적용되고 전단 속도가 결정됩니다.
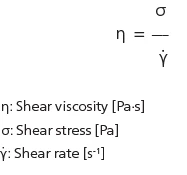
제어 모드에 관계없이 다음 공식을 사용하여 전단 점도를 결정할 수 있습니다:
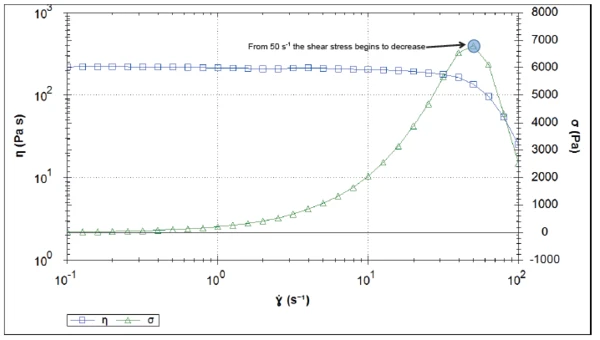
이러한 측정의 전단 속도 범위는 제한되어 있습니다. 원심력(재료를 바깥쪽으로 이동시키는 경향)이 정상 힘(위쪽 형상을 위로 밀어 올리는 힘)을 초과하면 샘플이 측정 간극 밖으로 튀어나올 수 있습니다. 이 경우 결과 점도 곡선을 매우 주의 깊게 평가해야 합니다. 전단 응력 곡선은 그 유효성을 보여주는 지표 중 하나입니다. 전단 속도가 증가함에 따라 항상 증가해야 하므로 전단 응력의 감소는 측정 범위의 한계를 나타냅니다.
그림 2는 이러한 동작의 예를 보여줍니다. 여기에서는 0.1초에서 100초 사이의 회전에서 폴리머 용융(PEEK)을 측정했습니다. 50초-1에서 전단 응력이 감소하는 것은 이 시점에서 전단 응력이 떨어지기 시작하기 때문에 시료 배출(시료 파단이라고도 함)을 나타냅니다. 따라서 이 전단 속도 이상의 점도 값은 유효하지 않으며 시료를 대표할 수 없습니다.
더 높은 전단 속도에서 전단 점도를 얻는 방법은?
회전 레오미터에서 50초-1보다 높은 전단 속도에서 결과를 얻는 쉬운 방법은 콕스-메르츠 법칙을 사용하는 것입니다. 이 경험적 관계에 따르면 대부분의 비충진 폴리머 용융물의 경우 전단 점도 η는 복합 점도 η*로 예측할 수 있습니다. 더 빠른 처리 조건이나 더 높은 전단 속도에서 유동 거동을 측정하기 위한 대안으로 고압 모세관 레오미터를 사용할 수 있습니다.
복소점도란 무엇인가요?
복소점도는 진동 측정을 통해 얻을 수 있습니다. 이 테스트에서는 상단 지오메트리가 더 이상 회전하지 않고 지정된 주파수로 진동합니다(그림 3).
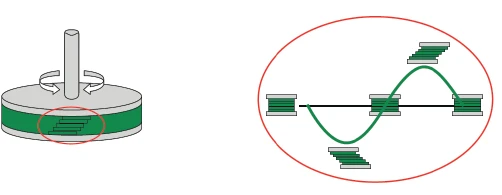
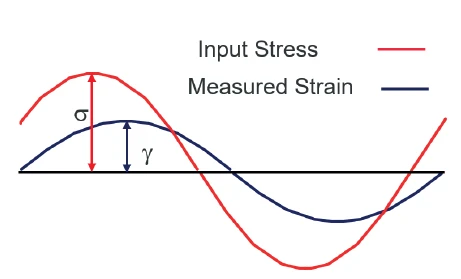
입력 및 출력 정현파 신호의 차이(지연/위상 δ)는 시료의 재료 특성을 정의합니다(그림 4). 이러한 측정은 샘플의 구조를 파괴하지 않을 만큼 small 진폭에 대해 수행되므로 적용된 변형과 그에 따른 응력이 비례하고 응답의 주파수가 입력 주파수와 동일합니다.
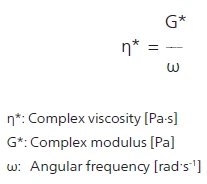
이러한 유형의 테스트를 통해 재료의 점탄성 특성, 예를 들어 소위 복소 계수인 G*로 제공되는 강성1을 정량화할 수 있습니다. 복소점도인 η*는 다음과 같습니다:
복합점도 및 전단점도: 콕스-메르츠 법칙
콕스-메르츠 법칙은 다음과 같은 관계로 요약할 수 있습니다:
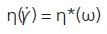
이를 한마디로 표현하면 전단 속도 함수로서의 전단 점도 결과(회전에 의해 얻어진)는 각도 주파수 함수로서의 복소 점도 결과(진동에 의해 얻어진)와 동일하다는 것을 의미합니다. 따라서 이 문서에 제시된 예의 경우 50초-1인 회전 측정의 한계보다 높은 전단 속도에 대한 전단 점도를 얻을 수 있습니다.
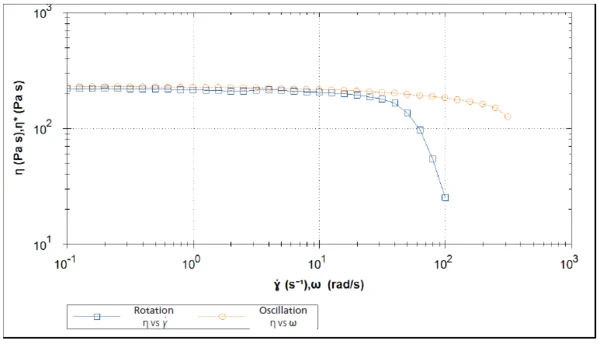
그림 5는 동일한 눈금에서 전단 속도와 각도 주파수의 함수로 플롯된 PEEK 샘플의 회전 및 진동 측정 결과를 보여줍니다. 이러한 곡선은 콕스-메르츠 법칙에 대한 설명과 함께 전단 속도 함수로만 표시되는 것이 일반적입니다. 그림 5에 표시된 결과는 낮은 전단 속도 범위에서 복소 점도와 전단 점도가 잘 일치한다는 것을 나타냅니다. 전단 속도가 높을수록 복소점도에 대한 콕스-메르츠 법칙을 사용하여 전단 점도의 보다 정확한 값을 얻을 수 있습니다(주황색 선). 전단 점도의 더 뚜렷한 감소(파란색 선)는 위에서 설명한 대로 시료 파손으로 인한 것입니다.
결론
표시된 예는 낮은 전단 속도 범위에서 전단 점도와 복합 점도가 잘 일치하는 것을 보여줍니다. 회전하는 동안 재료가 틈새에서 흘러나오기 시작하면 이러한 유형의 측정으로는 더 이상 점도를 결정할 수 없습니다. 그러나 콕스-머츠 법칙을 사용하면 진동 측정을 통해 전단 점도 값을 결정할 수 있습니다.