はじめに
ポリマーに一定の変形ε0を加えたときに生じる応力σは、時間依存性を持つ[1]。[これは、変形によって生じた応力を緩和するためにポリマー鎖が再配列するためである。[2] 結果として、緩和弾性率は時間に依存する:
さらに、温度上昇は分子運動を変化させず、加速させるだけであると仮定すると[3]、緩和弾性率は時間だけでなく温度にも依存する:
時間と温度は密接に関係している。温度が上昇すると、高分子間の自由体積が増加する。そのため、高分子は互いに滑りやすくなり、材料の緩和時間や他の特性、例えば粘度、耐破壊性、せん断弾性率(G*)などが低下する。
振動測定
上板は、周波数 f [Hz] (またはω [rad/s]) と振幅 [%] (またはせん断ひずみγ [%]) で振動する。この振動に必要なせん断応力σ [Pa]を決定する。結果試料の粘弾性特性、特に弾性率と損失せん断弾性率が決定されます。
実際、ほとんどの粘弾性材料のある温度での挙動は、時間スケールの変化によって別の温度での挙動から予測することができます[4]。シフト係数aT、すなわち温度TとTrにおける緩和時間の比は、2つの異なるモデルによって説明されます[2]:
- アレニウスシフトは、Tg + 100 K以上の半結晶ポリマーや非晶性熱可塑性プラスチックに有効である:
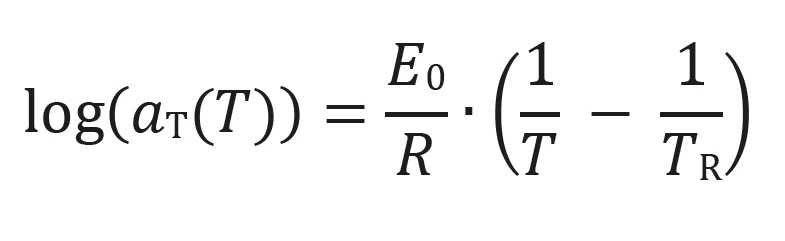
E0:緩和の活性化エネルギー[J/mol]、R:気体定数、TR:基準温度[K]
- ガラス転移温度付近で有効なWLFシフト:
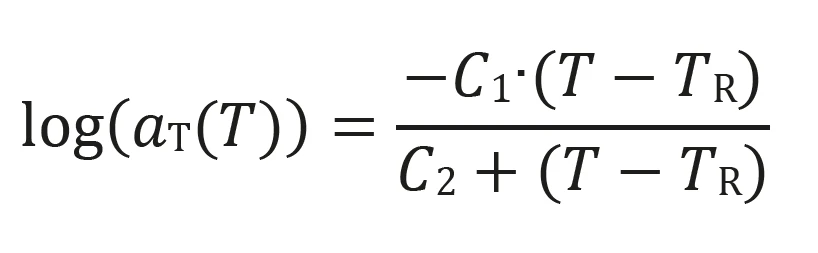
C1,C2:TR: 基準温度 [K]
このように粘弾性特性の曲線をシフトさせることが可能なため、測定時間を大幅に短縮することができ、非常に便利です。以下では、アスファルトバインダーのマスター曲線を作成するために、時間-温度重ね合わせ原理を使用します。そのために、異なる温度で周波数掃引測定を実施する。
表1:発振測定条件
| デバイス | キネクサスDSR |
| 測定モード | 発振、周波数掃引 |
| 形状 | プレートプレート、直径:4mm(PP4) |
| ギャップ | 1.7 mm |
| 温度 | -30℃、-15℃、0℃、15℃、30 |
| ひずみ | 0.017%, 0.079%, 0.020%, 0.398%, 0.796% |
| 周波数 | 100~0.1 rad.s-1 |
測定条件と結果
表1に測定条件を示す。図1~図5は、5つの異なる温度における周波数掃引測定の結果曲線を示している。図6、図7および図8は、すべての測定結果の弾性せん断弾性率、粘性せん断弾性率および位相角を比較したものです。
温度が高いほど、弾性せん断弾性率は低くなります。予想通り、アスファルトバインダーは温度が下がるにつれて硬くなる。30℃では、損失せん断弾性率は弾性せん断弾性率よりも高い。この温度では、材料の「液体のような」特性が「固体のような」特性を支配している。ここで、位相角は全周波数範囲にわたって45°よりわずかに高い(図1)。この材料は粘弾性液体である。
15℃での測定では、周波数2.5 rad.s-1で弾性率および粘性弾性率がクロスオーバーしている(図2)。このとき、位相はちょうど45°になる。周波数クロスオーバーより低い周波数では、液体のような特性が支配的である。
0℃、-15℃、-30℃でのテストでは、温度が下がるにつれて位相角が減少している。しかし、低い周波数の方向への位相角の増加は、すべての温度において、試料がおそらく粘弾性液体であることを示している。温度が低ければ低いほど、位相角が45°に達するのは遅くなる。
0℃、あるいはそれ以下の温度でのアスファルトの挙動は、寒い国での安定性を予測するために重要である。そのためには、クロスオーバーの周波数が重要である。しかし、測定に時間がかかりすぎるため、実用的な理由から実験的に検出することはできません。幸運なことに、時間-温度重ね合わせ法を応用することで、マスターカーブを作成することができる。
図9は、温度0℃における弾性せん断率のマスター曲線の作成を示しています。この基準温度よりも低い温度(-30℃、-15℃)と高い温度(15℃、30℃)で測定された曲線は、それぞれシフト係数aTだけ右と左にシフトしている。言い換えれば、温度が高くなると緩和過程が速く起こる(高い周波数にシフトする)。マスターカーブの計算、およびアレニウス・モデルとWLFモデルに使用される係数の計算は、rSpace ソフトウェアで自動的に行われる(表2参照)。
マスター曲線の開始周波数に注意する必要がある: 1.6-10-5rad/sであり、この1点の測定に170時間以上(7日以上!)を要したことになる!このようなテストは現実的ではないだろう。
位相角
位相角δ(tanδ=G"/G´)は、材料の粘性と弾性特性の相対的な尺度です。完全弾性材料の0°から完全粘性材料の90°までの範囲である。
表2:基準温度0℃の測定値から算出されたアレニウス係数とWLF係数。WLF係数k1とk2はWLF方程式のC1とC2に対応し、アレニウス係数k1はアレニウスモデルの係数E0/Rに対応する。

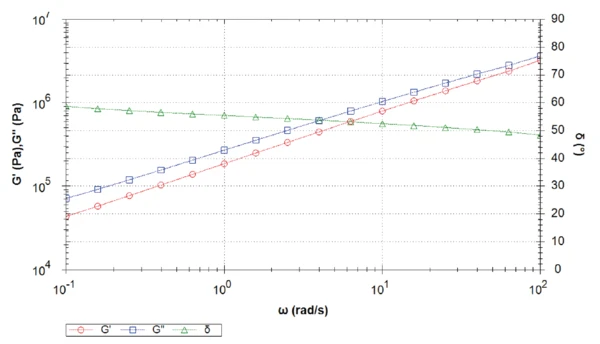
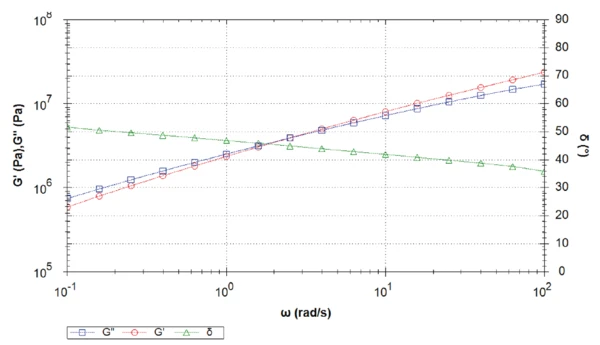
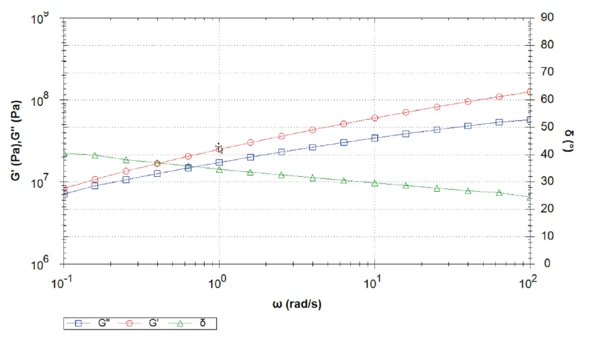
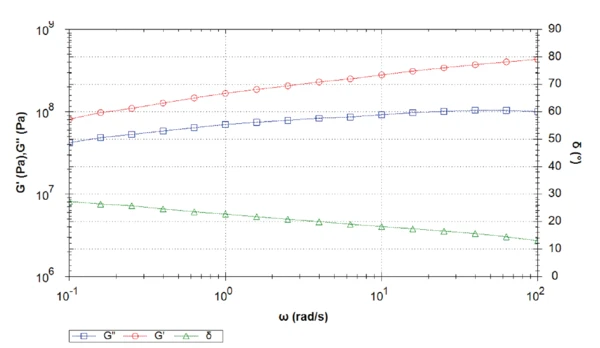
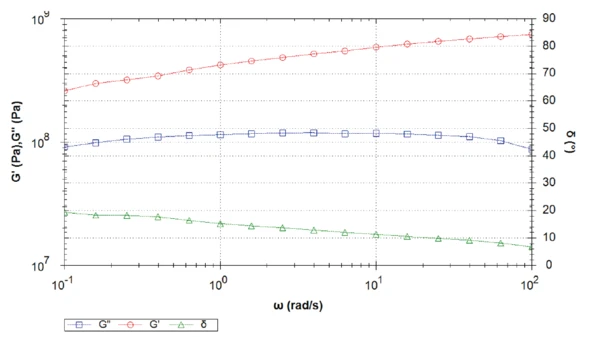
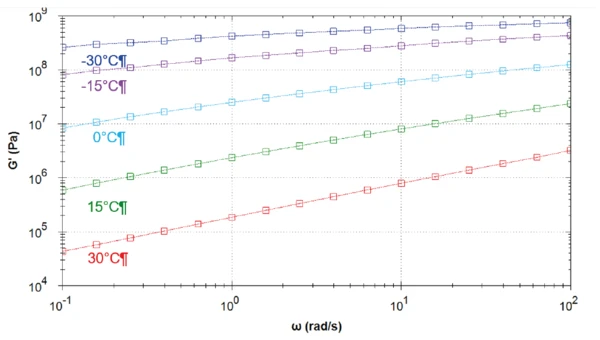
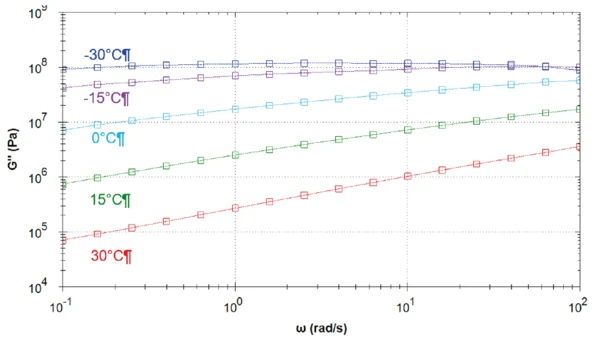
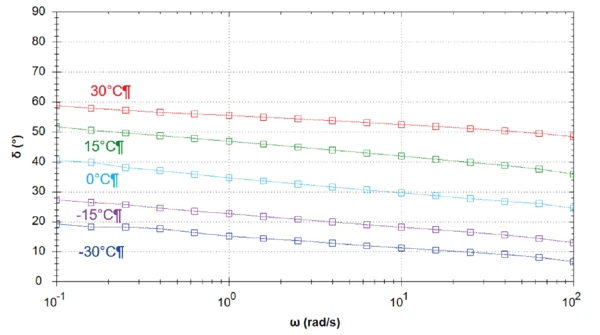
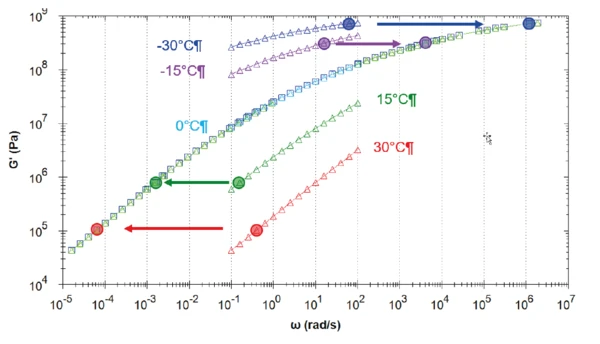
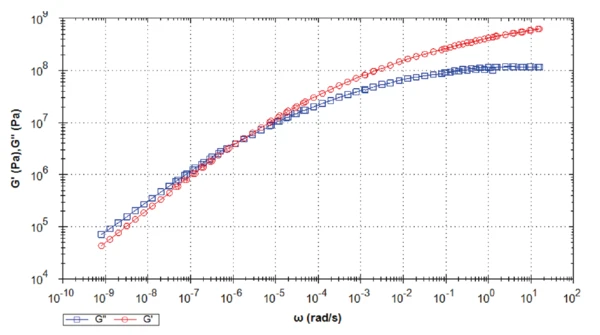
表3:異なる温度における弾性率および粘性せん断弾性率のマスター曲線のクロスオーバー判定

図10は、温度-30℃におけるアスファルトバインダーのマスターカーブを示している。温度が低いほど、計算で到達する周波数範囲は低くなる。ここでは、最初のポイントは10-9 rad-s-1以下である!10-7と10-6 rad-s-1の間で検出されたクロスオーバーは、非常に時間のかかる測定を行わなければ検出されなかったでしょう。
表3は、すべての温度で検出された弾性せん断弾性率と粘性せん断弾性率のクロスオーバーの結果をまとめたものです。アスファルトは、指定された温度に対して常に粘弾性液体のように振る舞う。温度が低ければ低いほど、クロスオーバー周波数は低くなり、材料構造の不安定化を誘発するプロセスは長くなる。
G'曲線とG''曲線のクロスオーバーが温度0℃で2.4・10-3Hzで起こる場合、これは約7分の時間スケールに相当する。つまり、時間スケールが7分より短ければ、材料は主に弾性を示す。実際には、これは道路が線形粘弾性範囲内の荷重下で安定していることを意味する。時間スケールが長くなると、材料が変形する(わだちが形成される)傾向が強くなります。
このアスファルトバインダーがより寒い気候、例えば-30℃で使用される場合、G'とG''のクロスオーバーはより低い周波数で、例えば時間スケールが増加します(ここでは約2ヶ月)。
結論
アスファルトバインダーの粘弾性挙動は、-30℃から30℃の温度で測定された。試験温度が低いほど、クロスオーバーの周波数は低くなる。クロスオーバーを得るために低周波数域のデータポイントを収集することは、非常に高い測定時間(数週間)に関係するため、実際には不便である。時間-温度重ね合わせ原理は、この問題を克服することを可能にした。延々と試験を行う代わりに、通常の周波数範囲にわたって5つの異なる温度で発振測定を行った。その結果得られたグラフをマスターカーブの作成に使用した。